Shells built out of small construction elements kept together by the force of friction or mortar have been known and studied since antiquity. With the advent of complex from-finding strategies in architecture and availability of computational power the topic of small element assemblies has received reconsideration and is currently offering attractive prospects of construction process optimization.
Shell structures are often built with the concrete cast over formwork which must be specifically designed in each construction case and is later discarded. Load bearing shells of small elements can offer a significant improvement in this regard. Geometries of shells, elements and the sequences of their installation might be designed in a way that minimizes, if not eliminates the use of supporting formwork and binders. The process and the result is called a stable assembly.
In our work, we examined the current state of research in the field and tried to develop our understanding and approach to designing stable assemblies. Our work bears exploratory character and unfolds in three parallel lines of thought. The first theme is the large-scale form-finding which leads us to the smaller scale of subdividing the surface into smaller elements (discretization) and the last step is designing a single brick and the way it connects to neighboring elements.
We modeled our structures with Rhino and Grasshopper. The PhysX engine was used to simulate the stability of the structures. We assumed a homogeneous density of the pieces and friction coefficients similar to that of brick. The pieces are assumed to be perfect solids - they are not deformable and unbreakable.
For the PhysX engine to correctly simulate the pieces, they needed to have convex geometries. We planarized the interfaces between them or deconstructed them into convex parts, that we grouped together in order for them to act as one piece.
For the assembly sequences, we assumed that each piece is placed on a perfect structure. Prior deformations were disregarded.
For the assembly sequences, we assumed that each piece is placed on a perfect structure. Prior deformations were disregarded.

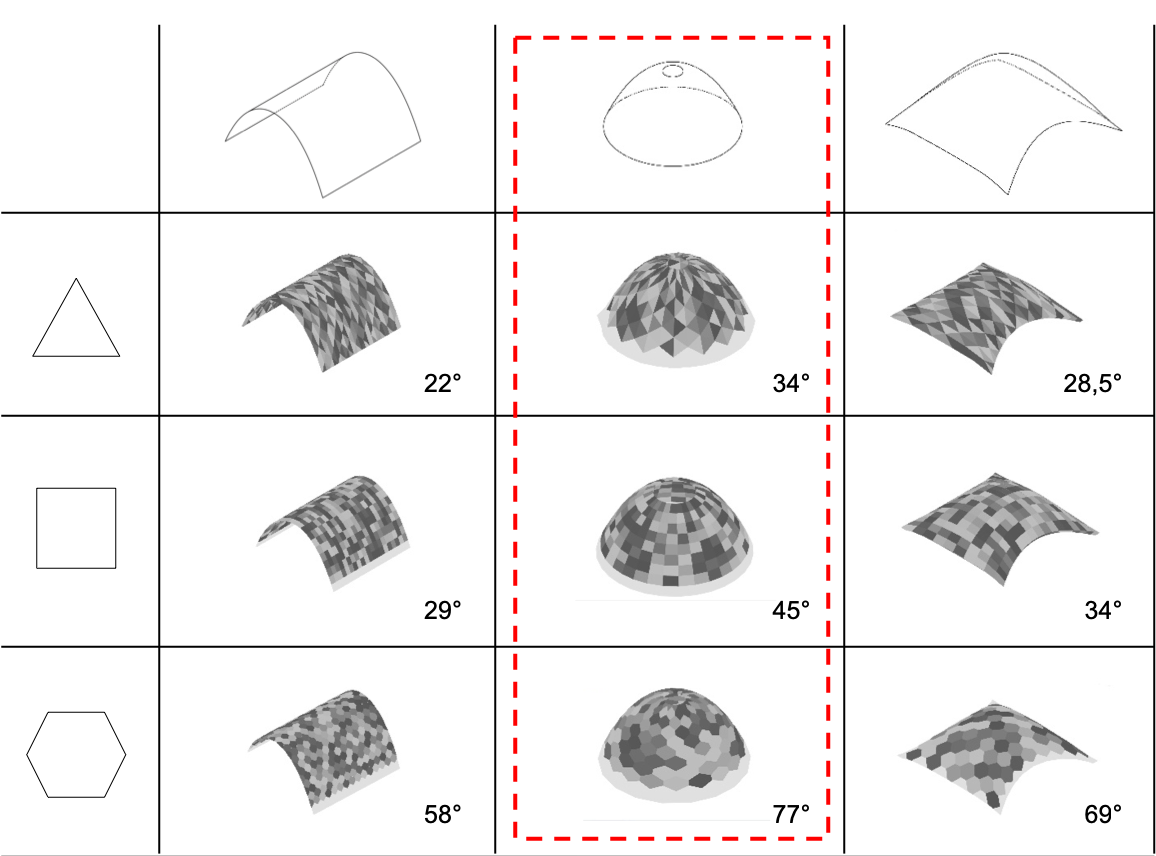
We analyzed different types of Tesselations on different geometric shapes. As a unit of measurement for the effectiveness of a given tesselation on a surface, we used the maximum build angle before pieces start to fall.
We tested three different tessellations; triangular, quadrilateral and hexagonal. Pentagonal tesselations were disregarded because of computational difficulties in generating them.
Triangular tesselations started failing very early and are not stable in general. Pieces rotated around two support points. The quadrilateral tesselations had the problem of little connection between the rows and pieces. The hexagonal tessellation has more interfaces to effectively transfer loads and can form arches in multiple directions which stabilized incomplete structures.
Due to their double curvature, the dome and shell had stronger forces between the vertical interfaces of the pieces than the barrel vault. This resulted in higher achievable build angles.
Collapse Behavior
Whilst observing the row wise assembly of our structures we noticed, that starting the next row was a difficult part in the assembly. The first piece in dome structures was usually unstable. As soon as two pieces of a row were in place they started to form a horizontal arch.
Displacement Analysis
By observing the assembly of a barrel vault with pre-build arches on the side and coloring the pieces by their displacement from their original point within 5 seconds of placing them we learned that displacement increased and therefore stability decreased the further we build from the arch.
By observing the assembly of a barrel vault with pre-build arches on the side and coloring the pieces by their displacement from their original point within 5 seconds of placing them we learned that displacement increased and therefore stability decreased the further we build from the arch.
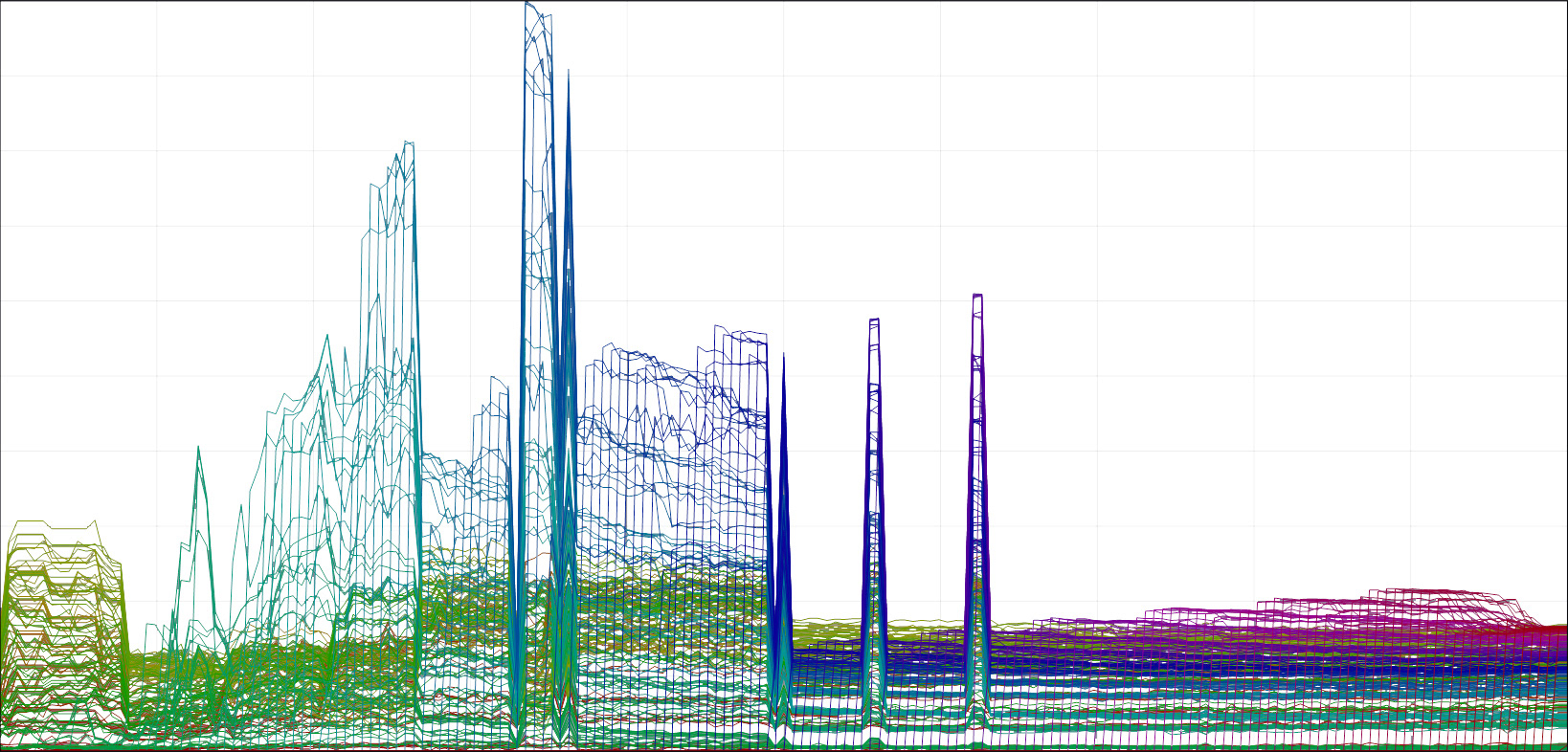
displacement of the individual pieces over time
Edge Manipulation
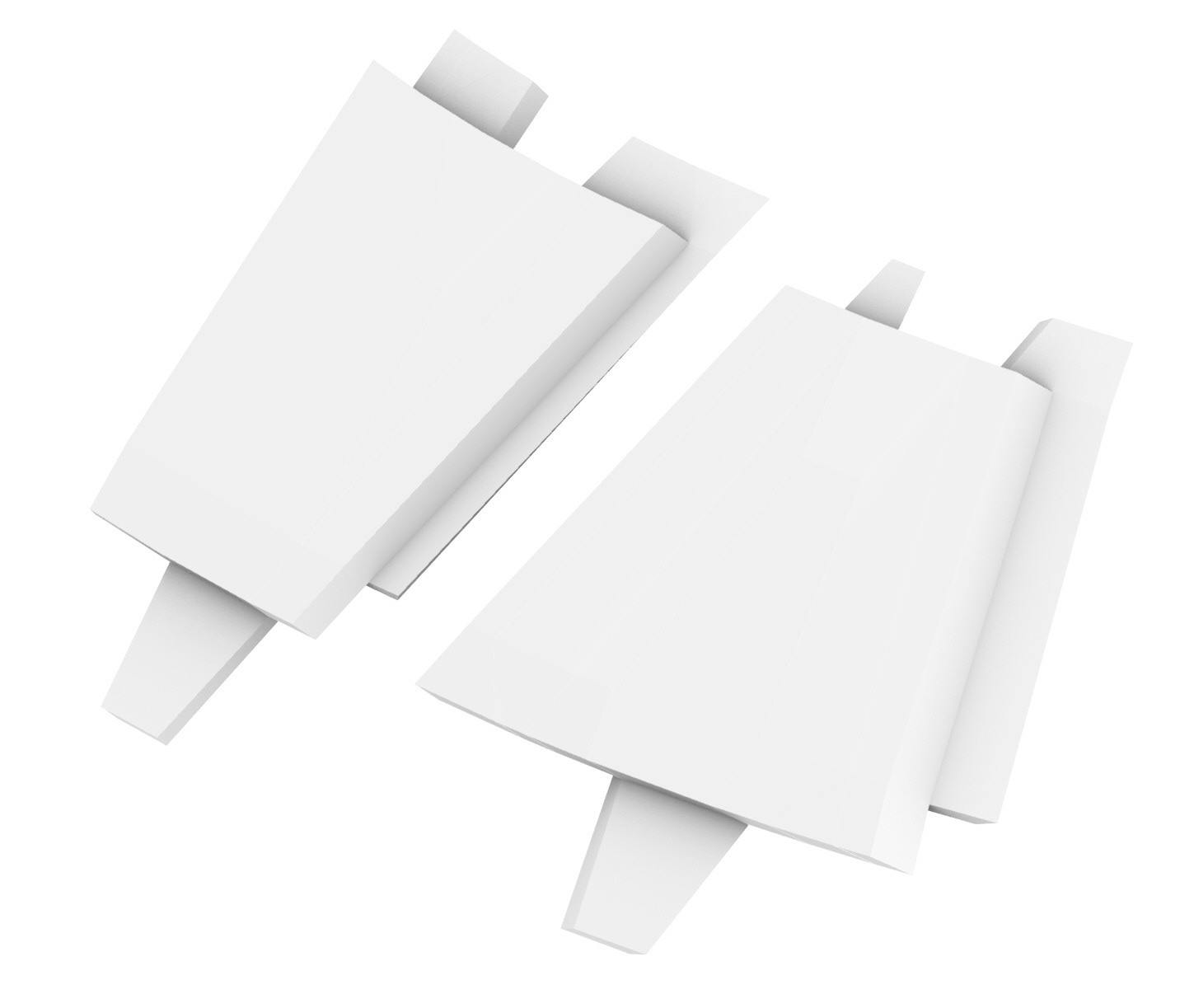
By applying a transformation to the edge of the quadrilateral tesselation that links the pieces better in horizontal and vertical directions we were able to increase the possible maximum assembly angle significantly.
By applying a transformation to the edge of the quadrilateral tesselation that links the pieces better in horizontal and vertical directions we were able to increase the possible maximum assembly angle significantly.
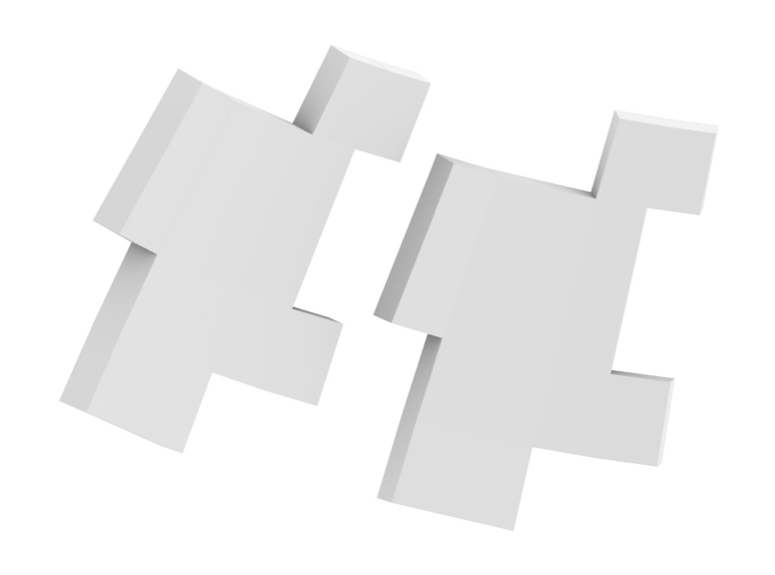
Edge Manipulation & Second Shell
By applying a transformation to the edge of the quadrilateral tesselation that links the horizontal rows and vertical columns we have made an attempt at synthesizing our findings and ideas and developing a ‘brick’ shape optimal for assembly and stability, which has also informed the assembly sequence. The geometry consists of two layers with a relative shift and spikes. The shift allows subsequent elements to rest on the previous ones and spikes add additional stability anchoring next row inside the previous. To allow the assembly of elements taking thickness into consideration the sides of elements were made inclined possible maximum assembly angle significantly.
By applying a transformation to the edge of the quadrilateral tesselation that links the horizontal rows and vertical columns we have made an attempt at synthesizing our findings and ideas and developing a ‘brick’ shape optimal for assembly and stability, which has also informed the assembly sequence. The geometry consists of two layers with a relative shift and spikes. The shift allows subsequent elements to rest on the previous ones and spikes add additional stability anchoring next row inside the previous. To allow the assembly of elements taking thickness into consideration the sides of elements were made inclined possible maximum assembly angle significantly.